あけましておめでとうございます
今年のお正月は初めてキャンプで迎えてみましたw
質問がございましたので早速Bayangtoys x21の日本語説明ページを
X21には英語マニュアルしかないので日本語で少し解説させていただいていますがまだ出先なので文字ばかりになりますがご了承ください。
お正月休み中に遊びたいと思いますので取り合えず早々にアップしておきます。
このページの目次
BayangtoysX21の覚えておくべき基本情報
送信機液晶画面の解説
左上には
機体との電波状況
補足GPS個数
GPS ON/OFF
右上
バッテリー残量/送信機・機体
真ん中
機体の向き
下部
スピード、高度、距離
以上の内容が表示されます。
また、マニュアルには無いですが
フォローミー、サラウンドなどを選択した場合は各表示が出てきます
送信機の機能説明
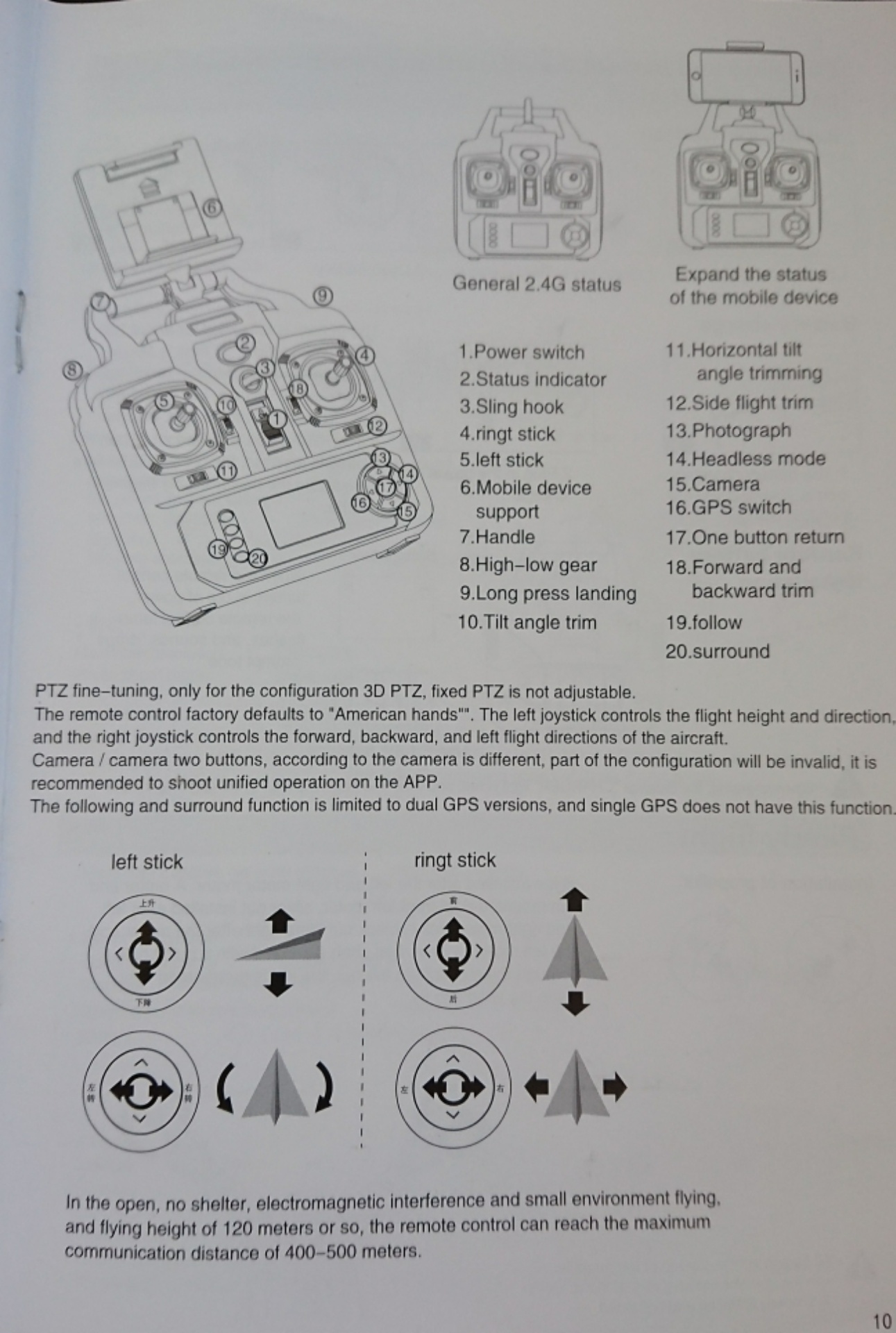
マニュアルのナンバー通りに日本語化してみますと
1,電源スイッチ
2,ステータスランプ
3,スリングフック
4,右スティック
5,左スティック
6,スマホホルダー
7,持ちて
8,スピードモード
9,自動着陸
10,未使用
11,未使用
12,横方向トリム
13,写真
14,ヘッドレスモード
15,ビデオ
16,GPSスイッチ
17,ワンキーリターン
18,前後方向トリム
19,フォローミー
20,アラウンド(POI)
となります。一部現在のW-GPS仕様では使わない機能は未使用とさせていただきました
飛行準備
X21の機能
Bayangtoys X21にはいくつかのセーフティ機能がついています
〇ローバッテリーリターン
機体のバッテリーが切れそうになると自動で帰還します
〇ノーシグナルリターン
電波が届かなくなると自動で帰還します
〇高度、位置維持
GPS情報をもとに無操作時には位置維持しながらホバリングをします。
※強風の中では返ってこない恐れもあるので強風時は風向きに注意しましょう。
送信機の操作編
ドローンに初めて触る方はまずは送信機の操作方法を頭に入れておく必要が有ります
上昇、下降
左スティックを前方向へ押すと機体が上昇します。
左スティックを手前方向へ押すと下降します
旋回
左スティックを左へ押すと左回転
左スティックを右に押すと右回転
※斜めになったりすると旋回しながら下降したりしますので不慣れな方は電源入れる前にシミュレーションしておきましょう
前進・後進
右スティックを前に押すと前進
右スティックを手前に押すと更新
横移動
右スティックを右に押すと右へ
右スティックを左に押すと左へ進みます。
自動で着陸させる(オートランディング)
右肩にあるボタンを長押しするとビープ音がなり自動着陸となります。
自分のところに戻す。(オートリターン)
送信機右下の矢印ボタンの真ん中が(ガラケーで言うと決定ボタン)オートリターンのボタンとなります。
まずはこの辺の操作は必ず覚えてしまいます。
操縦時にわからなくなったらスティックからは手を放しオートリターンキーを押しましょう
最初は広いところで木などの障害物が無いところで練習します
機体の準備
プロペラの取り付け
発送時にはプロペラはついていない状態で届きます。
飛行前にプロペラの向きに注意しながら取り付けます
お尻を手前にしてA1が左奥と右手前
B2が残りの個所への取り付けとなります。
ボルトとプロペラにきりこみが入っているので合わせて取り付け付属の金属棒で増し締めしておきます。
指先だけの力で回るだけ回すくらいでちょうど良いです。
スマホホルダーの取り付け(任意)
スマホホルダーは送信機についているダミーアンテナをいさぎよく抜き取り差し替えるようにできています。
中にアンテナが見えると思いますがアンテナを押し込まないようにして設置します
カメラの設定の注意点
カメラはFOVとして使えるのは中華スマホとiPhonの一部機種のようです。Xperiaは周波数対応はしていてもバンドが対応していないので補足できませんでした。日本向けのバンドを使用していないようです。
バッテリー
バッテリーは充電済みのものを準備してください
まず機体を水平な場所にお尻を手前に向けて置きます。
Bayangtoys X21は機体と送信機の双方にGPSが内応されている機種です。
飛行前に機体がどこにあってどちらの方向に向いているのかを確認させる必要があるのでいくつかの下準備が必要です。
電源を入れる
バッテリーを接続します。
送信機のスイッチをONにします。
機体の右腹にある電源スイッチをONにします。
これでビープ音と共に送信機と機体がバインドされます。
このときの期待のLEDランプはゆっくりした点滅となります。
送信機の液晶画面を見てGPSが7つ以上補足されていればコンパスキャリブレーションに進みます。
コンパスキャリブレーション
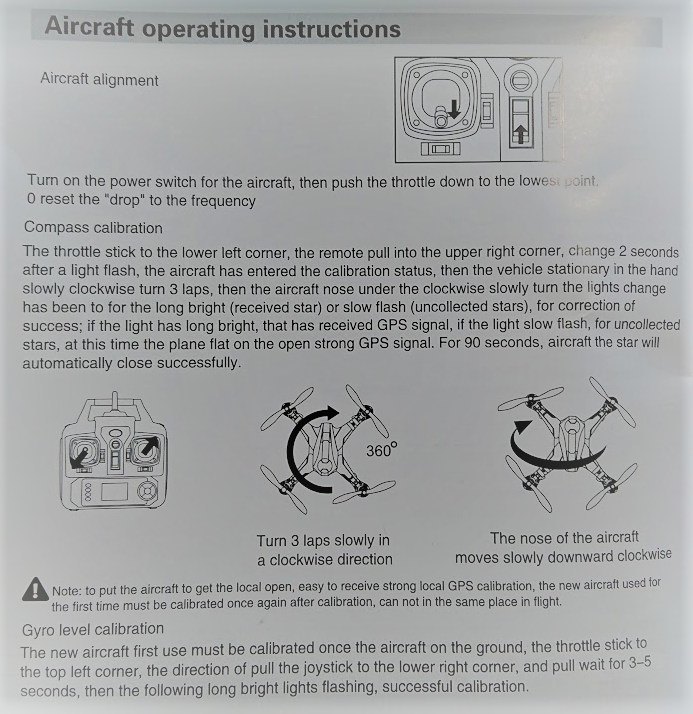
送信機の右スティックを右上、左スティックを左スティックを左下にあわせて機体のランプが素早い点滅になるまで待ちます。
素早い点滅に変わったら機体を持ち水平に時計回りに3回転。その後鼻を下に向けて時計回りに3回転させます。
これが終わったらもとの水平な場所に期待を置き機体のLEDランプが点灯に変わるまで待ちます。
点灯に変わればGPS機能を使用した飛行が可能になります。
エラーからの解除方法の正式なものは分からないのですが僕の場合はコンパスキャリブレーションを再度行いその時に
水平時計回り3回転は普通にしてノーズダウン(鼻を下にして)反時計回りに3回転でエラー点滅は解除できました。水平時計回り3回転、ノーズダウンは反対周りに3回転です。この時にGPSを補足しなくなったときはGPSモジュール(2000円位)を交換したらGPSを補足するようになりました。
ジャイロキャリブレーション
機体の水平状態を覚えさせます。
水平な場所に期待を置いていると思いますがその状態で送信機のスティックを
左スティックを左上
右スティックを右下とちょうどコンパスキャリブレーションとは反対の方向へ同時に押して機体のLEDランプが素早い点滅に変わるまで待ちます。
その後点灯に戻ればジャイロキャリブレーションも完了です。
ここまでで飛行準備は完了です。
これから飛ばす作業となりますがもう一度X21の機能のおさらい
・バッテリーは送信機上で12.〇ボルトとなっていると思いますがローバッテリーモードは10.5ボルト前後です。ゼロになるまで飛ばせるわけではありません。このくらいの機体バッテリー容量になると離陸後数秒で下降してきます。また、飛行中にローバッテリーになると自動的に帰還します。
・GPS機能で高度維持、位置の維持が可能です。送信機の操作をしていない状態ではその場でホバリングしてくれますので向きがわからなくなったらまずは何もしない事です。
・送信機の液晶には機体の向きが表示されます。飛ばす前に東西南北を確認しておきましょう。飛行中は向き情報は遅れて表示されるので向きがわからなくなったら一旦停止しましょ
飛行開始
コンパスキャリブレーション、ジャイロキャリブレーションが終わったら離陸です。
今はプロペラは回っていない状態でスティックを触っても飛んだりしません。ロック状態ですね
ロックを解除する
左スティックを左下、右スティックを右下へ(ハの字の一番下へ)押すとロックが解除されプロペラが回り出します。
今からはスティック操作で機体が動き出すので気を付けて操作してください。
プロペラが手に当たるくらいなら「痛い」ですみますが、顔や目にあたると大変です。
ロックする場合はもう一度両方のスティックでハの字の一番下へ
上昇させる
左スティックをゆっくり前方向へ押すと期待が上昇します。その時に送信機で操作しなくても位置が維持できていれば完璧です。
その後は左右のスティックを使って目視範囲で自由に飛ばせましょう。
着陸させる
左スティックを手前に押すと下降して着陸させることが出来ます。
右下の真ん中にあるオートリターンキーを押して自動で戻すことも可能です。
自分の近くにある場合は右肩にあるオートランディングボタンの長押しでゆっくり着地させることも可能です。
どちらの場合でも自動運転中も送信機操作は有効なので微調整することも出来たと思います。
再度飛ばす場合はプロペラが緩んでいないか確認しておきます
取り敢えず飛ばすまでの作業と注意点を書いてみました
これで飛ばせるとは思いますが 頑張ってください!
解らなければメールくださいw

