はじめに
この方法はYoutubeでMartinStaehle氏が公開してくださっていた情報をもとに改造した時の事を記事にしています。
詳細などを質問あれば訪ねていただいて良いのですが動画の通りにやったら出来たレベルなのでお役に立てるかどうかはわかりません🙇
準備するもの
必要なもの
Bayangtoys X21(GEARBEST)
電動ジンバル(GEARBEST)
JST Connector Plug (GEARBEST)(AMAZON)
ジャンパーケーブル(GEARBEST)(AMAZON)
Arduino Nano with Pin-Header(GEARBEST)(AMAZON)
JST PHR 2.0 Crimp Contact—-(標準カメラを使わない場合はカメラ側のケーブルをカットしてはんだ付けして流用可能)
絶縁テープ
パソコン
はんだごて、はんだ
ラジオペンチ
あったほうが良いもの
熱収縮チューブ
洗濯ばさみなど固定できるもの
ジンバルベースの取り付け
まずは機体にジンバルベースを取り付けておく。
プロポで操作しない場合はこれ付けて防振ゴムをベースにつけて外付けバッテリーにつなげばとりあえず水平は保たれる使い方は出来ます。です。
ジンバルベースはなるべく重心が変わりすぎない位置に取り付けるようにしたほうが無難ですね
大き目のバッテリーをつける場合は少し前目につけて、バッテリーを後方へとか考えて付けてみます。
少し前につけたほうが機体の足が映り込みにくくなりますよね。
ジンバルの取り付けはベース側の真ん中列にあるネジ穴を使用
自分の場合はこんな感じ。
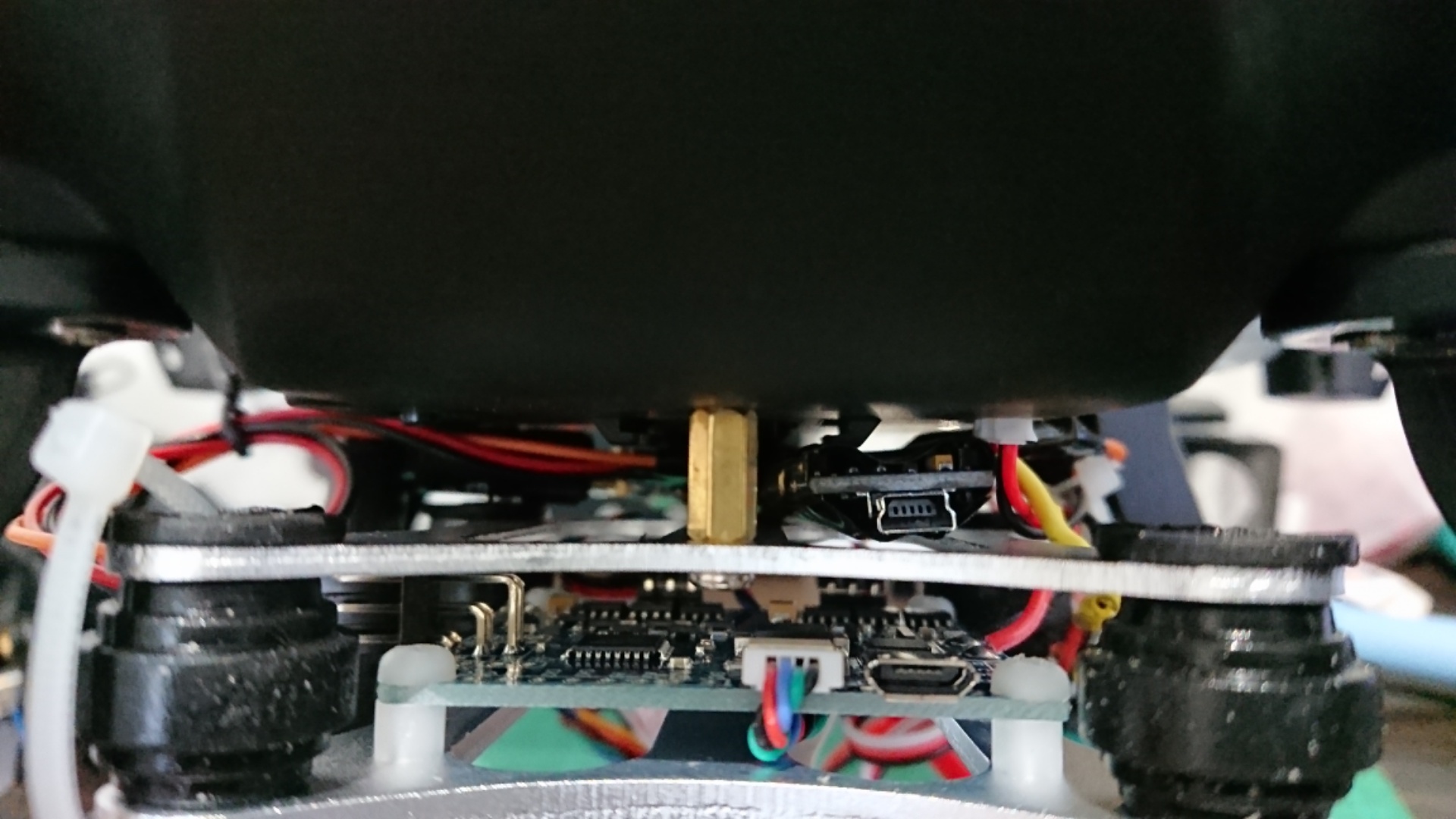
組付けた後の画像でわかりにくくて申し訳ありませんがジンバルについているあれで隙間を作ってArduinoを収納できるようにしています。これは機体を開けて中からねじ止めするのでめんどくさいです。
バッテリースペースから機体の外側まで7ミリほどの余裕があるのでタッピングネジで締めてしまっても構わないと思います。
バッテリーを取り外した状態で行えばバッテリーを傷つけることもないですよね
自分がつけたようにやると機体側への負荷が大きいのでワッシャなどをかましてやる必要がありますね。(完了後に思いついた)
ベースが出来たらArduinoの準備をします。
機体から信号を取る為に4番にジャンパーケーブルを接続
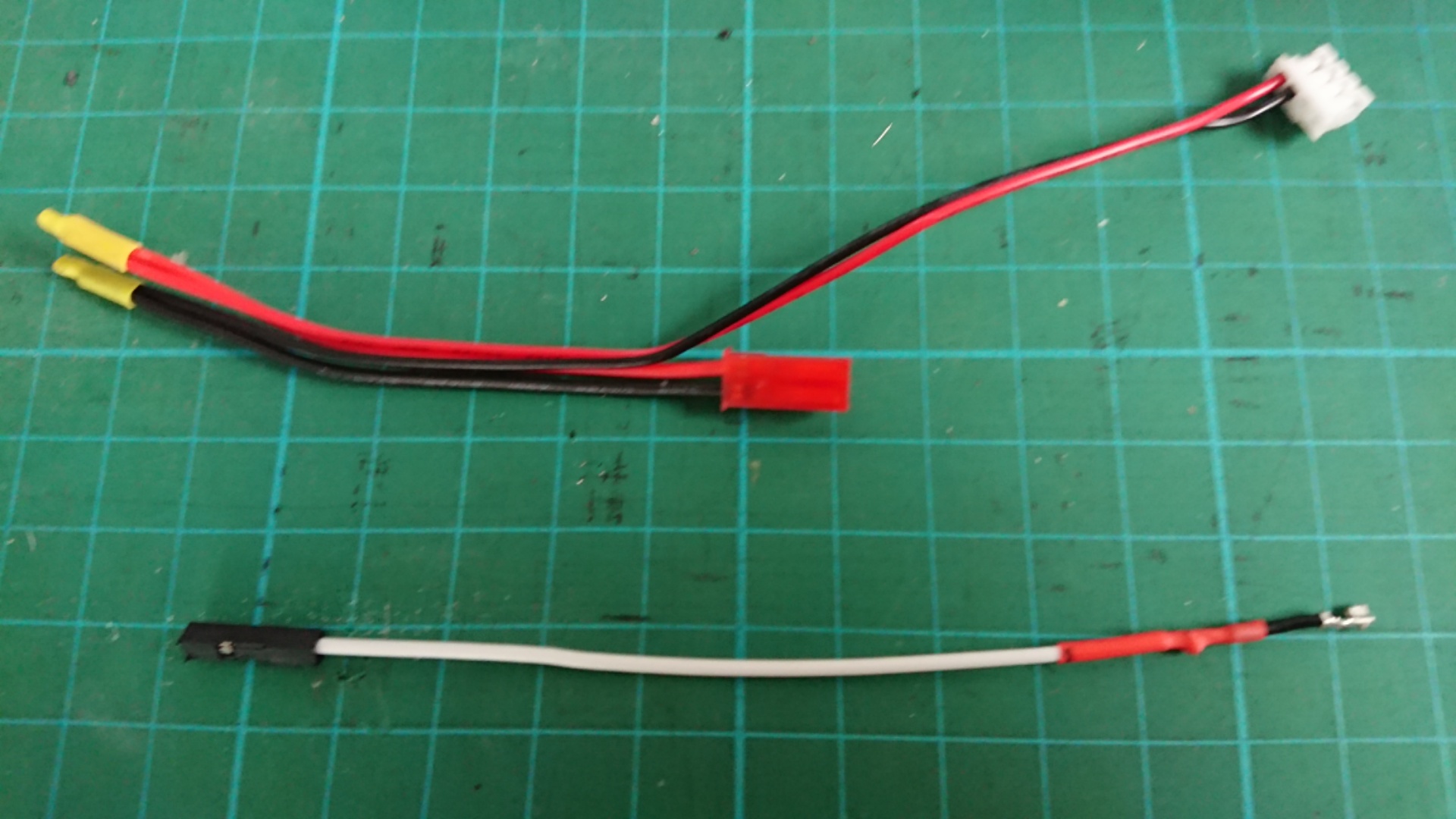 画像上部はx21のカメラの電源ケーブルをJSTコネクターに変更したもの。画像下部はジャンパーケーブルの先に2.0mm用ピンを取り付けたもの。ノーマルカメラを使わない場合はカメラ側のコネクターから端子を取り出してはんだ付け&絶縁処理して機体側に差し込んでもOKです。(画像のようになります)
画像上部はx21のカメラの電源ケーブルをJSTコネクターに変更したもの。画像下部はジャンパーケーブルの先に2.0mm用ピンを取り付けたもの。ノーマルカメラを使わない場合はカメラ側のコネクターから端子を取り出してはんだ付け&絶縁処理して機体側に差し込んでもOKです。(画像のようになります)
標準の電源ケーブルは2.0㎜なのでJSTプラグへ変更しておくと後が楽です。
熱収縮チューブが付いている部分がはんだ付けされています。
FPVシステムを実装する方は分岐ケーブルも作成
ArduinoのX21用のコードを書き込む
以下ダウンロード用URL
①X21ジンバルシステム プログラム


Arduinoドライバー WIn&Mac


Arduino IDE


以上の3つをダウンロードした後に
パソコンにArduinoをUSBケーブルで接続
IDEを開き①のコードを丸ごと置き換える(最初の記述は削除可)
IDEで書き込みをする。
エラーが出なければOKです。Arduinoから緑の点滅がなくなっていましたがこれが成功の印なのかな?
Arduinoについては詳しくないのでごめんなさい
Arduinoのコード書き換えが終わったらUSBケーブルを取り外し、必要のないピンを取ってしまいます。間違わないように。自分は白ケーブルのところを間違えて切っちゃいました。
▼接続してみるとこんな感じですね。オレンジのケーブルはYoutubeでは黄色ですね
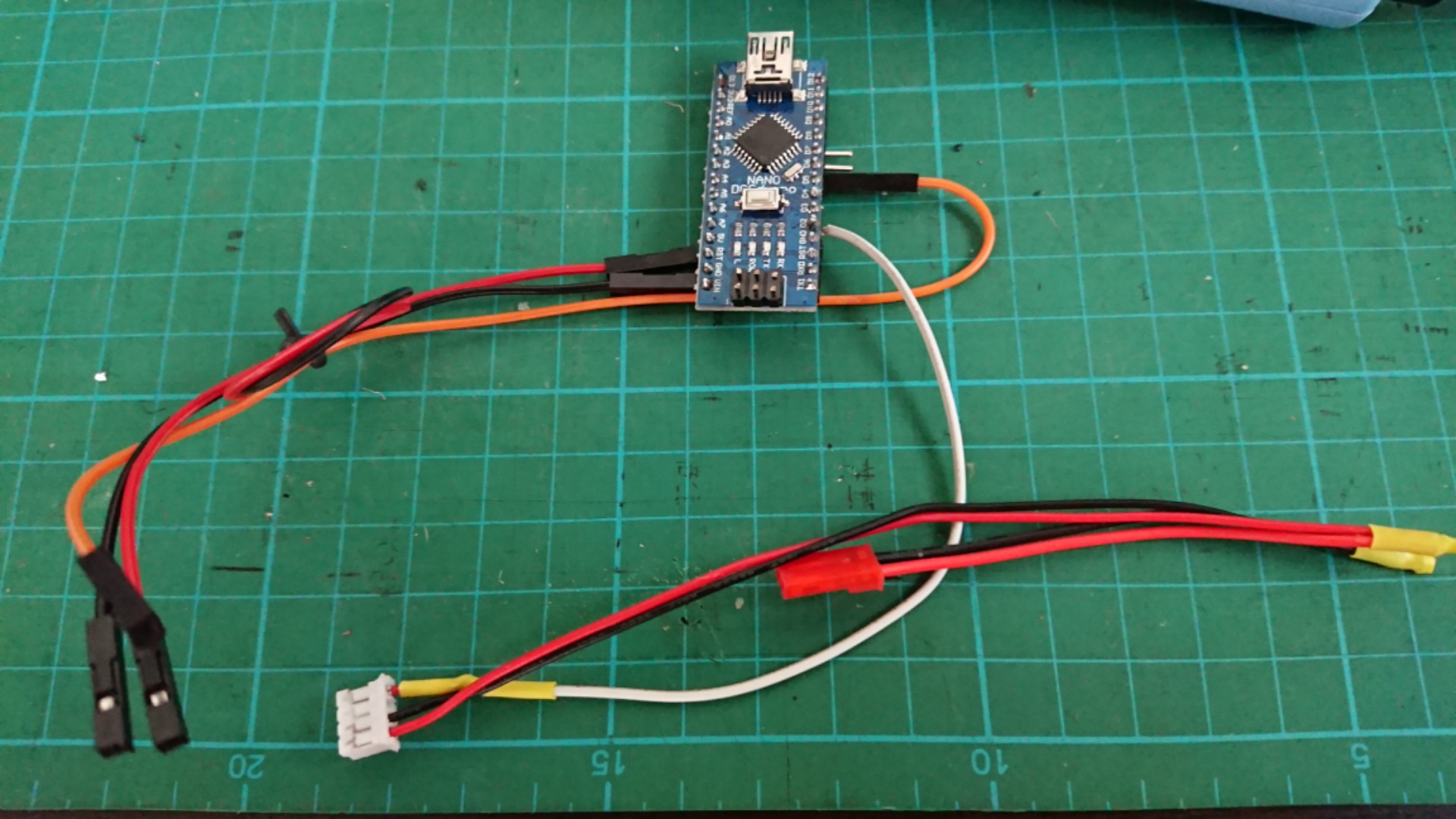
左に2本
5V-ジンバルのピッチ側中段
GND-ジンバルのピッチ側下段
右に4本
02-ドローン機体の電源ソケットの4番目
05-ジンバルのピッチ側上段
06-モード2の場合07と接続
07-モード2の場合06と接続
※モード1、2は任意で選べばよいです。モード2にしておくと無段階でボタンを押している時のみチルト動作します。
機体のバッテリーを使用せずに外付けのバッテリーを使用する場合は信号用のケーブルの追加が必要
機体側のGNDからロールのGNDへジャンパーケーブルを這わす(まだ自分はやってないです)
▼あとはArduinoNANOを絶縁対策

▼Fpvシステムを実装する方はこのような機体電源を分岐するケーブルを作っておくといいですね

このまで準備出来たらジンバルを取り付けてうまい具合に配線を処理して完了
▼ジンバル側の配線(オレンジのとこはホントは黄色ですね。)ジンバル側はこの三本と電源ケーブルの接続のみです。
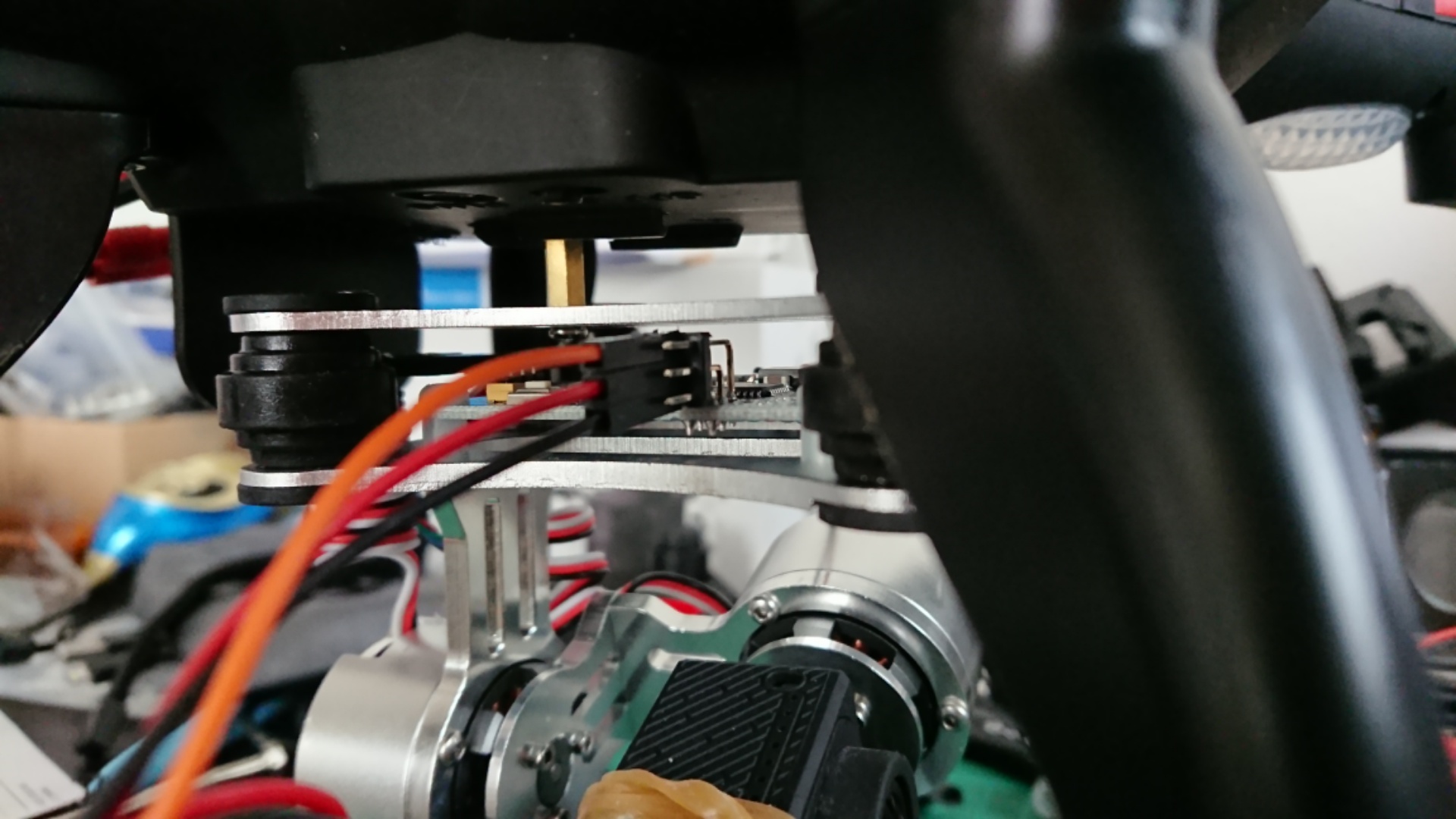
機体側のコネクターを差し、機体から出ているJSTコネクターをジンバルのJSTコネクターに接続。
FPVシステム以外の部分はこれで完了ですね
▼全部のせ
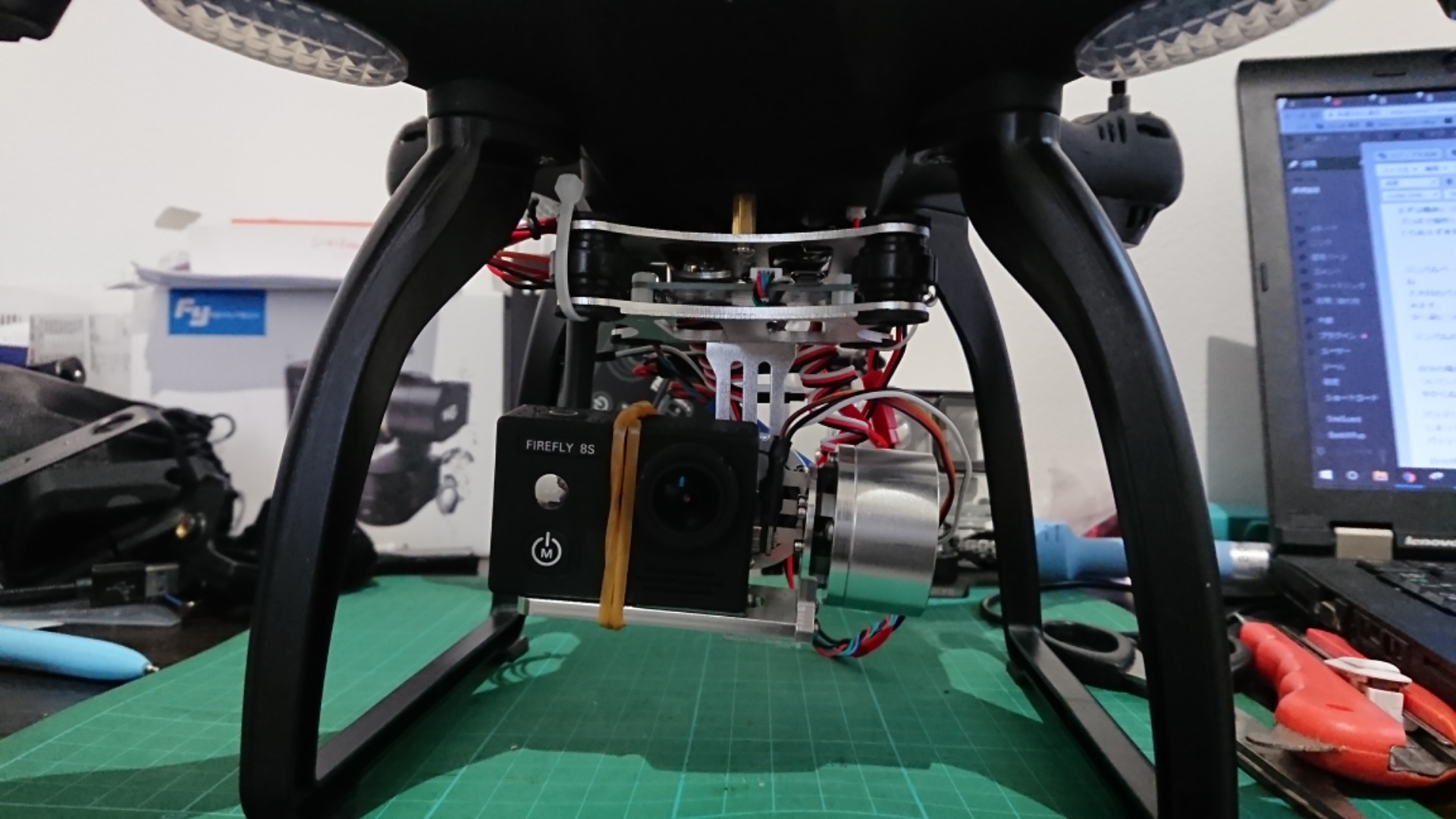
外付けバッテリーを載せる予定なので完全には仕上げていないですがこんな状態ですね
Firefly8sとFPVシステムも乗っかってますが詳細はこのページにまとめて追記していきます。
※重要注意 ジンバルの各部の接続が終わりX21のバッテリーを繋ぐとジンバルは動きます。カメラを載せずにジンバルを動かすのは故障の原因になりますので必ずカメラを載せてからX21のバッテリーを繋いでください
まとめ

